|
|
|
>visionsystems.de/Solutions/Data Communication Products
Connect CAN Busses via Network (Bridging Mode)
Data Communication Product Application
|
|
|
|
|
|
Basic : Connect several CAN Busses via Network
VS Vision Systems GmbH developed the VSCAN series of CAN Adapters, they are intended to provide a PC with means to get access to devices implementing the CAN Standard. This is also possible via network using the protocol TCP/IP, the adapters NetCAN Plus (NetCAN + for short) are designed for this purpose. This document covers special features, available by use of a network.
Instead of to a PC a NetCAN Plus can grant access to the CAN bus to another NetCAN Plus. As the overall result two CAN busses are connected to each other. In many installations the connections via TCP/IP just pass Ethernet, i.e. the local network or LAN. Figure 1 illustrates the principle behind this.
But TCP/IP also supports connections via Internet and such is available in the NetCAN + models. Such is shown as an example in Figure 1 where the connection passes one VPN Router and the Internet, plus finally another VPN Router to establish the data transfer. This is also possible in the other solutions, just not shown in Figures 2 & 3.
|
|
|
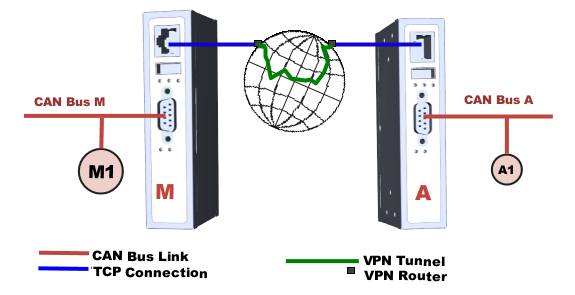 Figure 1
Figure 1: A Server with one Client |
|
|
The brown lines represent cables by CAN standard. The blue lines represent logical connections by TCP, these may be realized by different ways. Direct at NetCAN+ this is Ethernet or WLAN, further connects may be by optical fiber or other media. Even encrypted VPN tunnels (green lines) via Internet are possible.
The CAN bus on the left is marked with M, the connected NetCAN+ uses the same marking. On the right the NetCAN+ and CAN bus use the mark A. Of all the connected CAN bus devices M1 and A1 are shown as examples. The CAN Bus A in this context is named as Slave- or Daughter-Bus. A TCP connection is established between the two NetCAN+. NetCAN+ A is a Client here, which opens this connection to NetCAN+ M (the Server). This connection operates in bi-directional mode.
Data on bus M is sent or received by M1. At the same time the data is received by NetCAN+ M. Following the configuration the data are transmitted to NetCAN+ A, which sends them to bus A. Device A1 then receives the data. The transfer from bus A to bus M operates in exact opposite direction. All devices receive all data.
|
|
|
Scenario 1 with one Master and several Slave-Busses
In many situations the requirements are extended. Data exchange shall happen not only between two busses, but to one Master-bus there are several Slave-busses. This is also possible using NetCAN Plus devices, but implementers must consider special properties.
Configured as a Server a NetCAN+ can acceppt and serve multiple TCP connections simultaneously. Figure 2 shows one example of this.
|
|
|
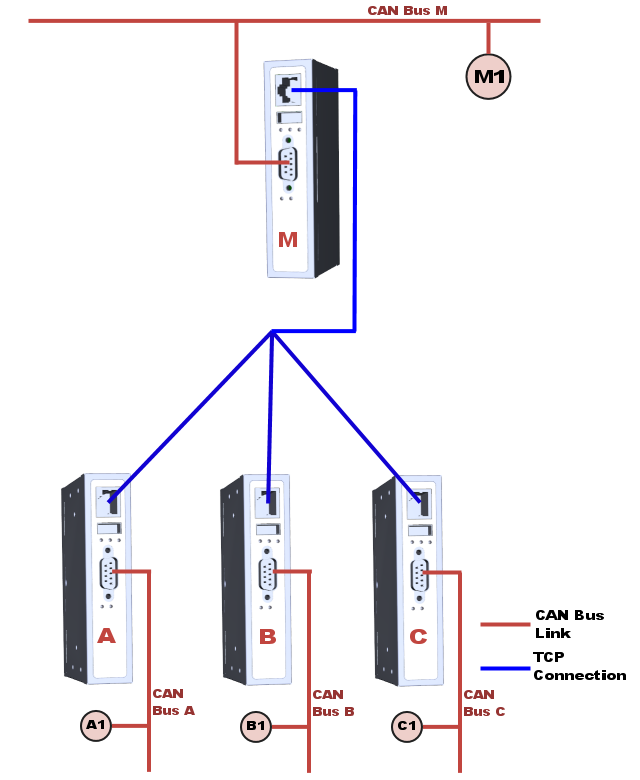 Figure 2
Figure 2: A Server with multiple Clients |
|
|
The symbols are the same as in Figure 1. CAN bus M is located on top, there are three Slave-busses A, B and C; all with connected devices. Each NetCAN+ A to C at the same time establishes a TCP connection to NetCAN+ M.
The data on bus M are forwarded by NetCAN+ M to all three NetCAN+ A to C, these send them to their related busses. All devices will receive all data originating on bus M.
However the NetCAN+ M only forwards those data to the Clients, which have been received from the CAN side. Data from device B1 are received by NetCAN+ B, and hence forwarded to NetCAN+ M, finally to bus M. All devices on bus M receive all data originating on busses A to C and M. Devices on bus A do not receive data originating on busses B and C. This is an easy configuration, if bus M shall collect all the data from the other busses too. Also if a Master like M1 sends requests to devices, it will receive the replies. Regardles of where that device is connected to CAN bus.
|
|
|
Scenario 2 with multiple Master and several Slave-Busses, complete transmission
This installation is intended for very similar requirements as Scenario 1, but now all devices on all busses need the function of communication with all devices on all other busses. Figure 3 is an illustration of the implementation for that purpose.
|
|
|
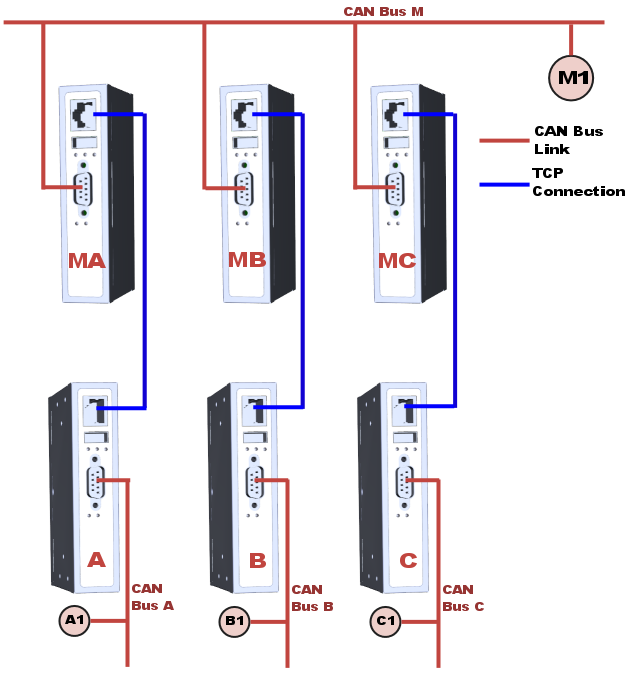 Figure 3
Figure 3: Multiple Bridges operate in parallel |
|
|
Again CAN bus M is connected to the Slave busses via NetCAN Plus. In contrast to Scenario 1 for each connection there is a separate bridge consisting of two NetCAN+, like in Figure 1. The Master connects to the NetCAN+ MA, MB and MC.
As before all CAN frames on CAN bus M are forwarded to all Slave busses A to C. But this time it happens by a separate NetCAN+ for each bus. In this respect this is the same operation as in Scenario 1.
But if now the device B1 sends a CAN frame, it will be forwarded by NetCAN+ B to NetCAN+ MB, so the data are transmitted to CAN bus M. Simultaneously these data are received by the NetCAN+ MA and MC. It does not matter which device put the data on that bus, they are all handled the same. Both the NetCAN+ MA and MC forward the data to the CAN busses A and C, where finally all devices receive the data originating on bus B.
As the net result a communication from all devices to all devices is possible.
|
|
|
Summary and special Remarks
It is possible to connect an unlimited number of CAN busses to each other, so data can be exchanged in the required manners. Depending on the special requirements the installation may be very simple, or it may require installation of more devices.
Implementers must consider:
- The medium for the bridging function is TCP/IP. At least on partial sections it is based on Ethernet or WLAN, so at first the real time options of CAN do no longer apply.
- Further there is a delay of some milliseconds between the busses. For this reason it is not possible to signal recognized error conditions back to the source of the data.
- And finally, the "unlimited" from the paragraph above is only valid with some limitations. Depending on data rate and throughput a NetCAN Plus as a Master can only handle so much Clients. This has to be verified in practical tests by the customer, in most implementations up to ten Clients seems realistic.
The protocol for data transmission is TCP/IP, so it is realistic to operate the NetCAN Plus via Internet.
Operation on this public network recommends the use of a secured VPN. Already built into the NetCAN + is the protocol known as OpenVPN.
A function like simple receive and store (for protocol) of all data on a bus has no requirements in a real time fashion, so this is especially suitable for use in wide area networks.
|
|
|
|
|

