|
|
|
>visionsystems.de/Lösungen/Data Communication Products
CAN Busse verbinden über Netzwerk (Brückenmodus)
Data Communications - Anwendungen
|
|
|
|
|
|
Basis : Verbinden mehrerer CAN Busse über Netzwerk
Die von VS Vision Systems GmbH entwickelten CAN Adapter der Serie VSCAN dienen dazu, einem PC Zugriff auf Geräte mit Anschluss nach dem CAN Standard zu ermöglichen. Dies ist auch möglich über Netzwerke mit dem Protokoll TCP/IP, hierzu wurden die Geräte NetCAN Plus (kurz NetCAN +) entwickelt. Dieser Artikel befasst sich allerdings mit einer speziellen Fähigkeit, die durch Nutzung eines Netzwerkes zugänglich ist.
Anstelle eines PC kann ein NetCAN Plus auch einem anderen NetCAN Plus Zugriff auf den CAN Bus ermöglichen. Im Endergebnis werden dadurch zwei CAN Busse miteinander verbunden. Vielfach werden die Verbindungen einfach über Ethernet aufgebaut, also über das lokale Netz oder LAN. Bild 1 zeigt das Prinzip.
Aber TCP unterstützt auch Verbindungen über das Internet und auch dies ist möglich mit den Modellen NetCAN +.
Das ist anhand eines Beispiels in Bild 1 dargestellt, wo die Verbindung über einen VPN Router und das Internet und danach schließlich über einen weiteren VPN Router erstellt wird und so den Transfer von Daten erlaubt.
Dies ist auch möglich in den anderen Szenarien, zur Vereinfachung in den Bildern 2 & 3 aber nicht dargestellt.
|
|
|
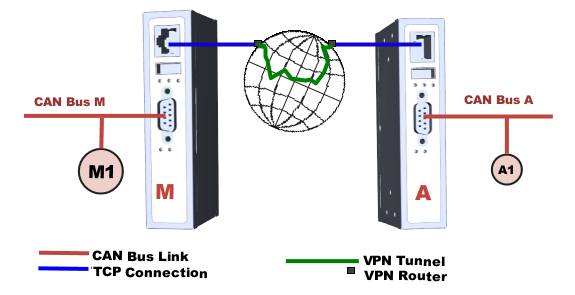 Bild 1
Bild 1: Server mit einem Client |
|
|
Die braunen Linien stehen für Verkabelung nach CAN. Die blauen Linien symbolisieren Verbindungen über TCP, welche über verschiedene Netzwerke realisiert sein können. Direkt am NetCAN+ ist es Ethernet oder WLAN, der weitere Weg kann auch über Glasfaser oder andere Medien erstellt werden. Sogar verschlüsseltes VPN (grüne Linien) über das Internet ist hier möglich.
Der linke CAN Bus ist mit M gekennzeichnet, der angeschlossene NetCAN+ trägt die gleiche Markierung. Rechts verwenden NetCAN+ und CAN Bus entsprechend die Kennung A. Von den angeschlossenen Geräten sind M1 und A1 als Beispiele aufgeführt. CAN Bus A wird in diesem Zusammenhang auch mit Slave- oder Tochter-Bus bezeichnet. Zwischen den beiden NetCAN+ besteht eine TCP-Verbindung. NetCAN+ A ist hier Client, und baut diese Verbindung zum NetCAN+ M (dem Server) auf. Diese Verbindung arbeitet bi-direktional.
Daten auf Bus M werden von M1 gesendet oder empfangen. Gleichzeitig werden sie auch vom NetCAN+ M aufgenommen. Entsprechend der Konfiguration werden diese Daten an den NetCAN+ A übertragen, welcher sie dann auf den Bus A sendet. Das Gerät A1 empfängt anschließend diese Daten. In genau umgekehrter Richtung verläuft der Transfer von Bus A nach Bus M. Alle Geräte können alle Daten empfangen.
|
|
|
Szenario 1 mit einem Master und mehreren Tochter-Bussen
Häufig besteht eine erweiterte Anforderung. Daten sollen nicht zwischen nur zwei Bussen ausgetauscht werden, sondern zu einem Master existieren mehrere Tochter-Busse. Auch dieses ist mit den NetCAN Plus möglich, spezielle Eigenschaften sind allerdings zu berücksichtigen.
Konfiguriert als Server kann ein NetCAN+ auch mehrere TCP Verbindungen gleichzeitig annehmen und bedienen. Das Bild 2 zeigt ein Beispiel.
|
|
|
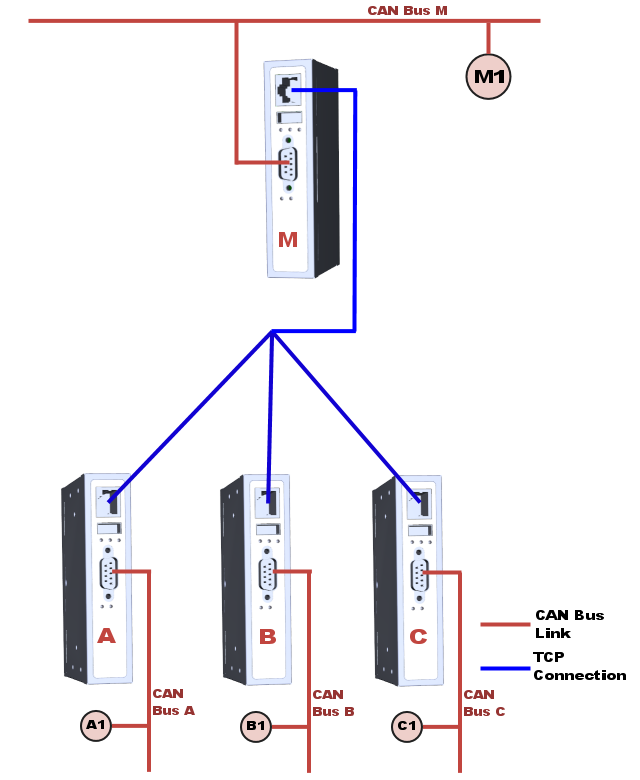 Bild 2
Bild 2: Server mit mehreren Clients |
|
|
Die Symbole sind identisch zu Bild 1. CAN Bus M ist oben, es existieren drei Tochter-Busse A, B und C; jeweils mit angeschlossenen Geräten. Jeder NetCAN+ A bis C baut gleichzeitig eine TCP Verbindung zu NetCAN+ M auf.
Daten auf Bus M werden vom NetCAN+ M an alle drei NetCAN+ A bis C übertragen, diese senden sie auf ihre jeweiligen Busse. Alle Geräte können alle Daten von Bus M empfangen.
Allerdings überträgt der NetCAN+ M nur Daten an die Clients, die er auf der CAN-Seite empfängt. Daten von Gerät B1 werden von NetCAN+ B an NetCAN+ M und somit an Bus M weitergeleitet. Alle Geräte auf Bus M empfangen alle Daten auf den Bussen A bis C und M. Geräte auf Bus A empfangen aber keine Daten von den Bussen B und C. Dies ist eine günstige Konfiguration, wenn auf Bus M alle Daten von dort, sowie die der anderen Busse gesammelt werden sollen. Auch wenn ein Master wie M1 Anfragen an Geräte stellt, empfängt er so die Antworten. Unabhängig davon, wo das angesprochene Gerät konkret angeschlossen ist.
|
|
|
Szenario 2 mit mehrfachen Mastern und mehreren Tochter-Bussen, komplette Übertragung
Diese Installation soll sehr ähnliche Anforderungen wie Szenario 1 erfüllen, allerdings sollen alle Geräte auf allen Bussen mit allen Geräten auf allen anderen Bussen kommunizieren können. Bild 3 zeigt wie dies möglich ist.
|
|
|
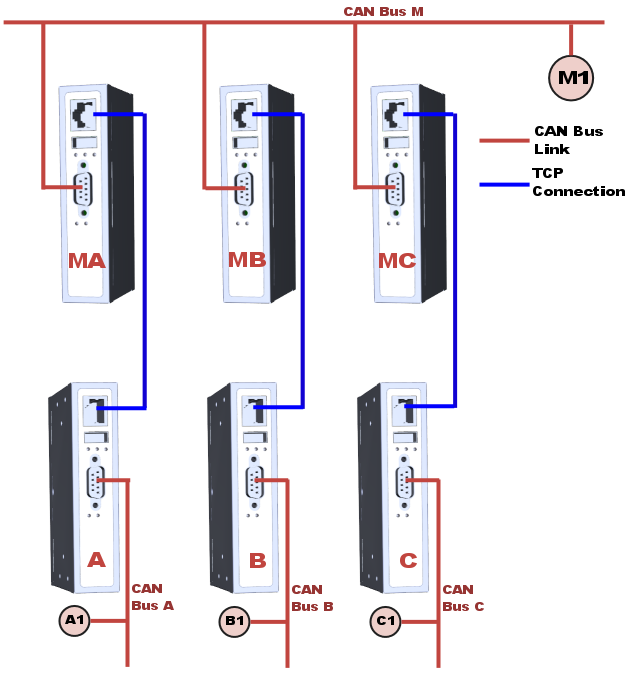 Bild 3
Bild 3: Mehrere Brücken parallel betrieben |
|
|
Wieder wird CAN Bus M über NetCAN Plus mit den Tochter-Bussen verbunden. Im Gegensatz zu Szenario 1 wird aber für jede Verbindung eine getrennte Brücke aus zwei NetCAN+ installiert, wie in Bild 1. Am Master werden die NetCAN+ MA, MB und MC verwendet.
Weiterhin werden alle CAN Frames auf CAN Bus M an alle Tochter-Busse A bis C weitergeleitet. Dieses Mal allerdings getrennt über je einen eigenen NetCAN+. Insoweit ist das die gleiche Leistung wie im vorigen Szenario.
Sendet jetzt aber Gerät B1 ein CAN Frame, so wird es von NetCAN+ B an NetCAN+ MB weitergeleitet, wodurch die Daten auf CAN Bus M übertragen werden. Auf diesem Bus werden die Daten gleichzeitig von den NetCAN+ MA und MC empfangen. Es spielt hier keine Rolle, welches Gerät die Daten auf den Bus gelegt hat, sie werden gleich behandelt. Die beiden NetCAN+ MA und MC leiten die Daten also an die CAN Busse A und C weiter, wo schließlich alle Geräte auch die Daten von Bus B empfangen.
In der Summe ist jetzt eine Kommunikation aller Geräte an alle Geräte möglich.
|
|
|
Fazit und spezielle Hinweise
Es ist möglich, beliebig viele CAN Busse untereinander zu verbinden, so dass Daten in erforderlichen Konfigurationen übertragen werden können. Je nach spezieller Anforderung kann die Installation ganz einfach sein, oder auch den Einsatz weiterer Geräte erfordern.
Hierbei muss man beachten:
- Das Übertragungsmedium für die Brückenfunktion ist TCP/IP. Mindestens an Teilstrecken baut es auf Ethernet oder WLAN auf, so dass zunächst die Echtzeitoptionen von CAN nicht mehr gelten.
- Weiter gibt es Verzögerungen im Bereich weniger Millisekunden zwischen den Bussen. Aus diesem Grund ist es nicht möglich, Fehlerkennungen bei der Übertragung auf dem Zielbus an die Quelle zurück zu melden.
- Und schließlich gilt auch das "beliebig viele" aus dem vorigen Absatz nur mit Einschränkungen. Je nach Datenrate und -Durchsatz kann ein NetCAN Plus als Master nur eine gewisse Anzahl von Clients bedienen. Das muss jeweils im praktischen Versuch verifiziert werden, in den meisten Fällen sind aber bis zu zehn Clients durchaus realistisch.
Das Protokoll zur Übertragung ist TCP/IP, die NetCAN Plus können also realistisch auch über das Internet arbeiten.
In diesem Umfeld ist die Nutzung eines gesicherten VPN angeraten. Die NetCAN + unterstützen bereits von Haus aus das Protokoll OpenVPN.
Eine Funktion wie das einfache Protokollieren aller Daten auf einem Bus stellt keine Anforderungen an Echtzeit, und ist daher in besonderem Maße für ein großes Netz geeignet.
|
|
|
|
|

